AGV (Automated Guided Vehicle)

AGV built by modifying an RC car, equipped with lidar, camera, IMU and various sensors for autonomous navigation.
Project Overview
Advanced Automated Guided Vehicle (AGV) system developed by modifying an RC car platform. The vehicle is equipped with a comprehensive sensor suite including lidar, cameras, and IMU for precise autonomous navigation and mapping capabilities.
Technical Specifications
Sensor Suite
- Lidar Sensor: 2D/3D lidar for environment mapping and obstacle detection
- Camera System: RGB camera for visual perception and navigation
- IMU (Inertial Measurement Unit): Accelerometer and gyroscope for orientation and motion tracking
- Additional Sensors: Various environmental and position sensors
Key Features
- Autonomous Navigation: Self-driving capabilities with path planning
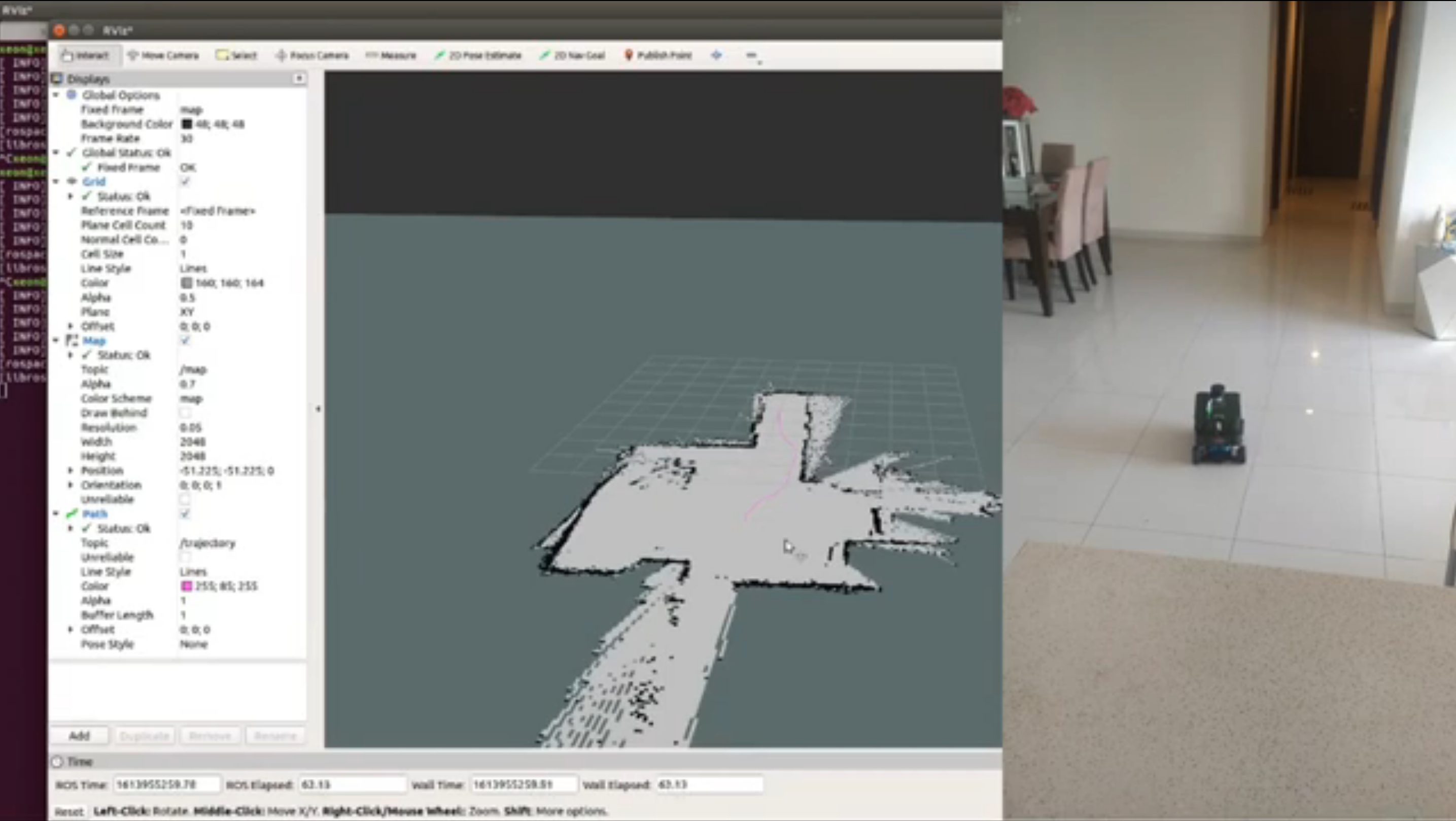
- SLAM Technology: Simultaneous Localization and Mapping
- Obstacle Avoidance: Real-time obstacle detection and avoidance
- Modular Design: Easily configurable and upgradeable platform